
{kind=link}
 Presentation of one of the best paper award on the RoboCup 2025 symposium.
Presentation of one of the best paper award on the RoboCup 2025 symposium.
An essential facet of autonomous soccer-playing robots considerations correct detection of the ball. That is the main focus of labor by Can Lin, Daniele Affinita, Marco Zimmatore, Daniele Nardi, Domenico Bloisi, and Vincenzo Suriani, which received one of the best paper award on the latest RoboCup symposium. The symposium takes place alongside the annual RoboCup competitors, which this yr was held in Salvador, Brazil. We caught up with a few of the authors to seek out out extra concerning the work, how their methodology will be transferred to purposes past RoboCup, and their future plans for the competitors.
Might you begin by giving us a short description of the issue that you simply had been making an attempt to unravel in your paper “Self-supervised Characteristic Extraction for Enhanced Ball Detection on Soccer Robots”?
Daniele Affinita: The primary problem we confronted was that deep studying usually requires a considerable amount of labeled information. This isn’t a significant drawback for widespread duties which have already been studied, as a result of you’ll be able to normally discover labeled datasets on-line. However when the duty is very particular, like in RoboCup, it is advisable to acquire and label the information your self. Which means gathering the information and manually annotating it earlier than you’ll be able to even begin making use of deep studying. This course of shouldn’t be scalable and calls for a big human effort.
The thought behind our paper was to scale back this human effort. We approached the issue by self-supervised studying, which goals to study helpful representations of the information. In spite of everything, deep studying is actually about studying latent representations from the accessible information.
Might you inform us a bit extra about your self-supervised studying framework and the way you went about growing it?
Daniele: To start with, let me introduce what self-supervised studying is. It’s a manner of studying the construction of the information with out getting access to labels. That is normally carried out by what we name pretext duties. These are duties that don’t require express labels, however as a substitute exploit the construction of the information. For instance, in our case we labored with photos. You possibly can randomly masks some patches and prepare the mannequin to foretell the lacking components. By doing so, the mannequin is pressured to study significant options from the information.
In our paper, we enriched the information by utilizing not solely uncooked photos but in addition exterior steerage. This got here from a bigger mannequin which we confer with because the trainer. This mannequin was skilled on a unique job which is extra common than the goal job we aimed for. This manner the bigger mannequin can present steerage (an exterior sign) that helps the self-supervision to focus extra on the precise job we care about.
In our case, we needed to foretell a good circle across the ball. To information this, we used an exterior pretrained mannequin (YOLO) for object detection, which as a substitute predicts a unfastened bounding field across the ball. We will arguably say that the bounding field, a rectangle, is extra common than a circle. So on this sense, we had been making an attempt to make use of exterior steerage that doesn’t clear up precisely the underlying job.
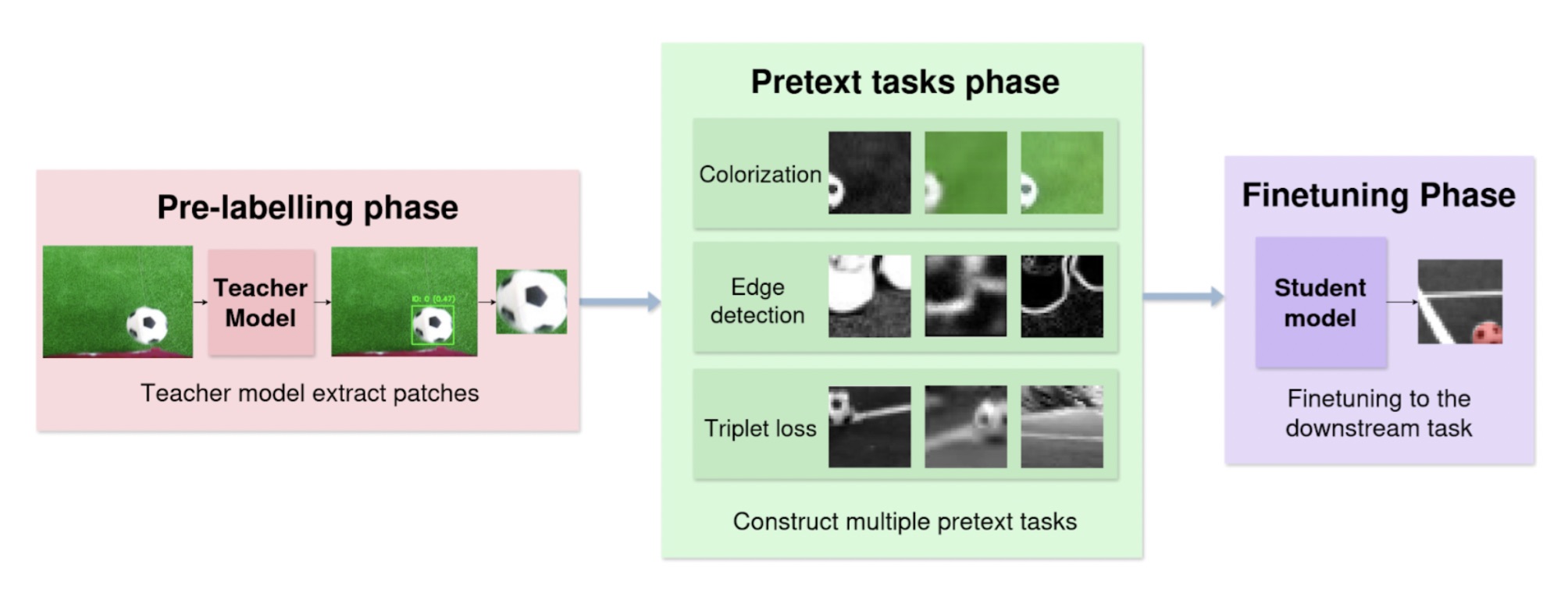 Overview of the information preparation pipeline.
Overview of the information preparation pipeline.
Have been you capable of take a look at this mannequin out at RoboCup 2025?
Daniele: Sure, we deployed it at RoboCup 2025 and confirmed nice enhancements over our earlier benchmark, which was the mannequin we utilized in 2024. Specifically, we observed that the ultimate coaching requires a lot much less information. The mannequin was additionally extra sturdy underneath totally different lighting circumstances. The problem we had with earlier fashions was that they had been tailor-made for particular conditions. However in fact, all of the venues are totally different, the lighting and the brightness are totally different, there is perhaps shadows on the sector. So it’s actually essential to have a dependable mannequin and we actually observed an important enchancment this yr.
What’s your crew title, and will you discuss a bit concerning the competitors and the way it went?
Daniele: So our crew is SPQR. We’re from Rome, and we have now been competing in RoboCup for a very long time.
Domenico Blois: We began in 1998, so we’re one of many oldest groups in RoboCup.
Daniele: Yeah, I wasn’t even born then! Our crew began with the four-legged robots. After which the league shifted extra in the direction of biped robots as a result of they’re more difficult, they require steadiness and, general it’s more durable to stroll on simply two legs.
Our crew has grown so much throughout latest years. We’ve been following a really constructive development, going from ninth place in 2019 to 3rd place on the German Open in 2025, and we bought 4th place at RoboCup 2025. Our latest success has attracted extra college students to the crew. So it’s form of a loop – you win extra, you entice extra college students, and you’ll work extra on the challenges proposed by RoboCup.
 SPQR crew.
SPQR crew.
Domenico: I need to add that additionally, from a analysis perspective, we have now received three greatest paper awards within the final 5 years, and we have now been proposing some new developments in the direction of, for instance, the usage of LLMs for coding (as a robotic’s behaviour generator underneath the supervision of a human coach). So we try to maintain the open analysis area energetic in our crew. We need to win the matches however we additionally need to clear up the analysis issues which can be certain along with the competitors.
One of many essential contributions of our paper is in the direction of the usage of our algorithms outdoors RoboCup. For instance, we try to use the ball detector in precision farming. We need to use the identical strategy to detect rounded fruits. That is one thing that’s actually essential for us; to exit the context of Robocup and to make use of Robocup instruments for brand new approaches in different fields. So if we lose a match, it’s not an enormous deal for us. We wish our college students, our crew members, to be open minded in the direction of the usage of RoboCup as a place to begin for understanding teamwork and for understanding methods to take care of strict deadlines. That is one thing that RoboCup may give us. We attempt to have a crew that’s prepared for each kind of problem, not solely inside RoboCup, but in addition different varieties of AI purposes. Successful shouldn’t be every little thing for us. We’d desire to make use of our personal code and never win, than win utilizing code developed by others. This isn’t optimum for attaining first place, however we need to train our college students to be ready for the analysis that’s outdoors of RoboCup.
You stated that you simply’ve beforehand received two different greatest paper awards. What did these papers cowl?
Domenico: So the final two greatest papers had been form of visionary papers. In a single paper, we needed to present an perception in methods to use the spectators to assist the robots rating. For instance, should you cheer louder, the robots are inclined to kick the ball. So that is one thing that isn’t truly used within the competitors now, however is one thing extra in the direction of the 2050 problem. So we need to think about how it will likely be 10 years from now.
The different paper was known as “play in all places”, so you’ll be able to, for instance, play with several types of ball, you’ll be able to play outdoors, you’ll be able to even play with no particular aim, you’ll be able to play utilizing Coca-Cola cans as goalposts. So the robotic has to have a common strategy that isn’t associated to the precise area utilized in RoboCup. That is in distinction to different groups which can be very particular. We’ve a unique strategy and that is one thing that makes it more durable for us to win the competitors. Nonetheless, we don’t need to win the competitors, we need to obtain this aim of getting, in 2050, this match between the RoboCup winners and the FIFA World Cup winners.
I’m concerned about what you stated about transferring the strategy for ball detection to farming and different purposes. Might you say extra about that analysis?
Vincenzo Suriani: Our lab has been concerned in some totally different tasks regarding farming purposes. The Flourish undertaking ran from 2015 – 2018. Extra not too long ago, the CANOPIES undertaking has focussed on precision agriculture for everlasting crops the place farmworkers can effectively work along with groups of robots to carry out agronomic interventions, like harvesting or pruning.
We’ve one other undertaking that’s about detecting and harvesting grapes. There’s a enormous effort in bringing information again from RoboCup to different tasks, and vice versa.
Domenico: Our imaginative and prescient now could be to give attention to the brand new era of humanoid robots. We participated in a brand new occasion, the World Humanoid Robotic Video games, held in Beijing in August 2025, as a result of we need to use the platform of RoboCup for different kinds of purposes. The thought is to have a single platform with software program that’s derived from RoboCup code that can be utilized for different purposes. In case you have a humanoid robotic that should transfer, you’ll be able to reuse the identical code from RoboCup as a result of you should use the identical stabilization, the identical imaginative and prescient core, the identical framework (roughly), and you’ll simply change some modules and you’ll have a totally totally different kind of software with the identical robotic with roughly the identical code. We need to go in the direction of this concept of reusing code and having RoboCup as a take a look at mattress. It’s a very powerful take a look at mattress, however you should use the ends in different fields and in different purposes.
Wanting particularly at RoboCup, what are your future plans for the crew? There are some massive adjustments deliberate for the RoboCup Leagues, so may you additionally say how this may have an effect on your plans?
Domenico: We’ve a really robust crew and a few of the crew members will do a PhD within the coming years. One in every of our targets was to maintain the scholars contained in the college and the analysis ward, and we had been profitable on this, as a result of now they’re very passionate concerning the RoboCup competitors and about AI normally.
By way of the adjustments, there might be a brand new league inside RoboCup that may be a merger of the usual platform league (SPL) and the humanoid kid-size league. The humanoid adult-size league will stay, so we have to determine whether or not to hitch the brand new merged league, or transfer to adult-sized robots. For the time being we don’t have too many particulars, however what we all know is that we are going to go in the direction of a brand new period of robots. We acquired robots from Booster and we at the moment are buying one other G1 robotic from Unitree. So we try to have an entire household of latest robots. After which I believe we are going to go in the direction of the league that’s chosen by the opposite groups within the SPL league. However for now we try to arrange an occasion in October in Rome with two different groups to alternate concepts and to know the place we need to go. There may even be a workshop to debate the analysis aspect.
Vincenzo: We’re additionally in dialogue about one of the best measurement of robotic for the competitors. We’re going to have two totally different positions, as a result of robots have gotten cheaper and there are groups which can be pushing to maneuver extra rapidly to a much bigger platform. Alternatively, there are groups that need to persist with a smaller platform in an effort to do analysis on multi brokers. We’ve seen a variety of purposes for a single robotic however not many purposes with a set of robots which can be cooperating. And this has been traditionally one of many core components of analysis we did in RoboCup, and likewise outdoors of RoboCup.
There are many factors of view on which robotic measurement to make use of, as a result of there are a number of elements, and we don’t know the way quick the world will change in two or three years. We try to form the foundations and the circumstances to play for subsequent yr, however, due to how rapidly issues are altering, we don’t know what one of the best resolution might be. And in addition the analysis we’re going to do might be affected by the choice we make on this.
There might be some adjustments to different leagues within the close to future too; the small and center sizes will shut in two years in all probability, and the simulation league additionally. Loads will occur within the subsequent 5 years, in all probability greater than over the last 10-15 years. It is a important yr as a result of the choices are based mostly on what we will see, what we will spot sooner or later, however we don’t have all the data we’d like, so it will likely be difficult.
For instance, the SPL has an enormous, in all probability the most important, neighborhood among the many RoboCup leagues. We’ve a variety of groups which can be grouping by curiosity and so there are groups which can be sticking to engaged on this particular drawback with a selected platform and groups which can be making an attempt to maneuver to a different platform and one other drawback. So even inside the identical neighborhood we’re going to have a couple of perspective and hopes for the longer term. At a sure level we are going to attempt to determine what’s the greatest for all of them.
Daniele: I simply need to add that in an effort to obtain the 2050 problem, for my part, it’s essential to have only one league encompassing every little thing. So up thus far, totally different leagues have been specializing in totally different analysis issues. There have been leagues focusing solely on technique, others focusing solely on the {hardware}, our league focusing primarily on the coordination and dynamic dealing with of the gameplay. However on the finish of the day, in an effort to compete with people, there should be just one league bringing all these single elements collectively. From my perspective, it completely is smart to maintain merging leagues collectively.
In regards to the authors

|
Daniele Affinita is a PhD pupil in Machine Studying at EPFL, specializing within the intersection of Machine Studying and Robotics. He has over 4 years of expertise competing in RoboCup with the SPQR crew. In 2024, he labored at Sony on area adaptation methods. He holds a Bachelor’s diploma in Pc Engineering and a Grasp’s diploma in Synthetic Intelligence and Robotics from Sapienza College of Rome. |
|
Vincenzo Suriani earned his Ph.D. in Pc Engineering in 2024 from Sapienza College of Rome, with a specialization in synthetic intelligence, robotic imaginative and prescient, and multi-agent coordination. Since 2016, he has served as Software program Growth Chief of the Sapienza Soccer Robotic Workforce, contributing to main robotic competitions and worldwide initiatives akin to EUROBENCH, SciRoc, and Tech4YOU. He’s at present a Analysis Fellow on the College of Basilicata, the place he focuses on growing clever environments for software program testing automation. His analysis, acknowledged with award-winning papers on the RoboCup Worldwide Symposium (2021, 2023, 2025), facilities on robotic semantic mapping, object recognition, and human–robotic interplay. |

|
Domenico Daniele Bloisi is an affiliate professor of Synthetic Intelligence on the Worldwide College of Rome UNINT. Beforehand, he was affiliate professor on the College of Basilicata, assistant professor on the College of Verona, and assistant professor at Sapienza College of Rome. He obtained his PhD, grasp’s and bachelor’s levels in Pc Engineering from Sapienza College of Rome in 2010, 2006 and 2004, respectively. He’s the writer of greater than 80 peer-reviewed papers printed in worldwide journals and conferences within the area of synthetic intelligence and robotics, with a give attention to picture evaluation, multi-robot coordination, visible notion and knowledge fusion. Dr. Bloisi conducts analysis within the area of melanoma and oral carcinoma prevention by automated medical picture evaluation in collaboration with specialised medical groups in Italy. As well as, Dr. Bloisi is WP3 chief of the EU H2020 SOLARIS undertaking, unit chief for the PRIN PNRR RETINA undertaking, unit chief for the PRIN 2022 AIDA undertaking. Since 2015, he’s the crew supervisor of the SPQR robotic soccer crew collaborating within the RoboCup world competitions |

|
Can Lin is a grasp pupil in Information Science at Sapienza college of Rome. He holds a bachelor diploma in Pc science and Synthetic intelligence from the identical college. He joined the SPQR crew in September of 2024, specializing in duties associated to laptop imaginative and prescient. |

Lucy Smith
is Managing Editor for AIhub.