")
{kind=link}
16.7K
On this complete tutorial, I’ll stroll you thru the method of constructing an FPV drone from scratch, offering detailed steering for each analogue and digital FPV techniques. We’ll cowl every thing from deciding on the best elements, to wiring and meeting, and even share insider ideas and tips to make sure you have a dependable and pleasurable FPV drone expertise.


A few of the hyperlinks on this web page are affiliate hyperlinks. I obtain a fee (at no further value to you) should you make a purchase order after clicking on one in every of these affiliate hyperlinks. This helps assist the free content material for the neighborhood on this web site. Please learn our Affiliate Hyperlink Coverage for extra data.
Can Learners Construct FPV Drones?
Completely! Even if in case you have no prior expertise, newcomers can completely construct FPV drones.
Positive, it may be tempting to easily purchase a ready-made drone off the shelf—however the place’s the enjoyable (and studying) in that? By assembling your individual drone from scratch, you’ll achieve worthwhile hands-on data about every part and the way all of them work collectively. You’ll even be a lot better ready to troubleshoot and restore your drone if something goes fallacious.
Now, I gained’t sugar-coat it—constructing your first FPV drone will likely be difficult. It could take hours, and even days, to finish. Alongside the best way, you’ll want to hunt recommendation from skilled pilots on-line or determine issues out by way of trial and error. However belief me—the sense of accomplishment and the talents you achieve will make the journey extremely rewarding.
So, let’s dive in and embrace the challenges forward!
Mastering the Fundamentals
Earlier than we embark on this thrilling tutorial, it’s essential to familiarize your self with the fundamentals of a quadcopter.
To get began, try our beginner-friendly information: Getting Began with FPV Drone.
As you discover the world of FPV, you’ll seemingly encounter many acronyms and technical phrases. Don’t let these intimidate you! When unsure, seek advice from our useful glossary: Decoding Acronyms and Technical Phrases in FPV.
Components Record
On this tutorial, we’ll be utilizing the next elements to information you thru the FPV drone constructing course of.
Only a fast word: the hyperlinks offered are affiliate hyperlinks. Making a purchase order by way of these hyperlinks gained’t value you something further, however it’ll earn me a small fee. This assist helps maintain the weblog working and permits me to proceed sharing my ardour for FPV drones with you—thanks!
This explicit construct focuses on the DJI O4 Professional Air Unit. In case you’re taken with constructing an analog FPV drone, try my different construct log right here: https://oscarliang.com/how-to-build-fpv-drone-analog/
In case you have a small funds, right here is an inventory of the most cost effective 5″ drone elements.
In order for you extra choices, right here is an inventory of elements that I like to recommend.

Body

The body is the sturdy construction that holds the entire drone’s elements collectively.
For this tutorial, I’ve chosen the GEPRC Vapor—a wonderful selection because of its excessive construct high quality. It additionally comes with quite a lot of 3D-printed equipment, making for an extremely straightforward and clear construct.
Take a look at my detailed evaluate of this body, together with step-by-step meeting directions, right here: https://oscarliang.com/geprc-vapor-x5-d5-frame/.
FC and ESC

Shopping for the flight controller (FC) and ESC collectively as a stack shouldn’t be solely extra inexpensive, but it surely additionally ensures that they’re plug-and-play proper out of the field, making the drone constructing course of a lot smoother and extra simple.
For this tutorial, I’ve chosen the Speedybee F405 V4 stack. Regardless of being probably the most inexpensive FC/ESC stacks in the marketplace, it doesn’t compromise on options. It helps nearly all trendy functionalities you’d need in an FPV drone. Take a look at my in-depth evaluate of the Speedybee F405 V4 right here: https://oscarliang.com/speedybee-f405-v4/.
If the Speedybee F405 V4 is out of inventory, don’t fear—there are many wonderful options. Right here’s an inventory of my prime suggestions: https://oscarliang.com/flight-controller/#The-Greatest-FC-Suggestions.
Motors

FPV motors in the present day are surprisingly comparable when it comes to efficiency, particularly on the newbie degree. Which means there’s no want to purchase the costliest motors once you’re simply beginning out—most individuals wouldn’t even discover the distinction. Price range choices just like the EMAX ECO II sequence are greater than satisfactory for newcomers.
For a 5-inch FPV drone, motor sizes similar to 2306, 2207, and 2208 are all viable selections. Personally, I imagine 2207 hits the candy spot when it comes to performance-to-weight ratio. Study extra concerning the variations right here: https://oscarliang.com/2306-2207-mini-quad-motor/
One other vital issue to contemplate is motor KV, which is linked to your battery voltage. For a 6S construct, I like to recommend selecting motors with a KV ranking between 1600 and 2000. Increased KV motors ship extra aggressive and power-hungry efficiency. On this construct, I’ve chosen 1900KV motors, as the following decrease possibility (1700KV) feels a bit too low for my style.
There are a lot of different wonderful motors price contemplating—try my full checklist of suggestions right here: https://oscarliang.com/motors/#Suggestions
FPV Setup

There are a number of FPV techniques obtainable in the marketplace, however the DJI O4 Professional can be my best choice for a 5-inch freestyle drone. It affords the very best picture high quality and sign reliability, and top-notch construct high quality. If you wish to be taught extra concerning the completely different FPV techniques and their professionals and cons, try my purchaser’s information: https://oscarliang.com/fpv-system/
Radio Receiver

Your selection of radio transmitter dictates the kind of receiver (RX) you should utilize. In case you adopted my radio suggestions, your radio ought to assist ExpressLRS (ELRS), which is presently my best choice for a radio hyperlink. ExpressLRS is inexpensive, high-performance, and extremely dependable: https://oscarliang.com/expresslrs/
Quite a few producers produce receivers and transmitter modules for ExpressLRS. You possibly can select any of those, and so long as they’re ExpressLRS, they’ll work collectively. For this tutorial, I’ve chosen the BetaFPV ELRS 2.4GHz Nano, which is among the cheaper choices in the marketplace and works nicely.
That will help you arrange ExpressLRS, I’ve put collectively a step-by-step tutorial: https://oscarliang.com/setup-expresslrs-2-4ghz/
To fly a quadcopter in FPV, you’ll want the next equipment. Check out my on a regular basis gear for inspiration. Here’s a abstract:
Instruments and Provides
To construct the drone, you’ll additionally want the next instruments and provides. You might have already got a few of these gadgets, if not, they need to be simply discovered on-line or at your native ironmongery shop.
Important:
Optionally available however really useful:
For these really passionate concerning the passion, right here’s a complete checklist of instruments that you could be discover invaluable in your FPV drone-building journey.
Steps of Constructing FPV Drone
Click on the hyperlink will take you to the part on this article:
1. Body Meeting
Observe my detailed step-by-step tutorial to assemble the GEPRC Vapor body: https://oscarliang.com/geprc-vapor-x5-d5-frame/
You should full the body meeting to this stage earlier than transferring on to the following steps.

2. Putting in Motors
Now, it’s time to mount the 4 motors onto the arms.
The EMAX ECO II motors include screws of various lengths. Use the screws with a 7mm thread size, that are appropriate for 5mm thick arms.

It’s extremely really useful to make use of threadlocker (similar to Loctite) on the motor screws, as vibrations could cause them to loosen over time.
Some motors include threadlocker pre-applied (showing as a blue coating on the threads), however the ECO II motors don’t, so that you’ll want to use it your self.

Some builders use solely three screws and even two to save lots of weight, however I like to recommend utilizing all 4 screws for optimum sturdiness.

Necessary: Earlier than totally tightening the motor screws, be certain they aren’t too lengthy and aren’t urgent in opposition to the motor windings. In case you’re not sure, comply with this information: https://oscarliang.com/check-motor-screws-touching-winding/


3. Wiring Diagrams
In case you’re utilizing the elements I really useful, seek advice from this wiring diagram for steering.

Earlier than reducing and soldering any wires, you’ll be able to “dry match” all of the elements within the body. This course of lets you gauge how lengthy the wires needs to be, decide the very best location on your elements, and establish any potential spacing points.

4. Putting in ESC
Begin by putting in the 4 lengthy bolts that include the Vapor body into these holes.


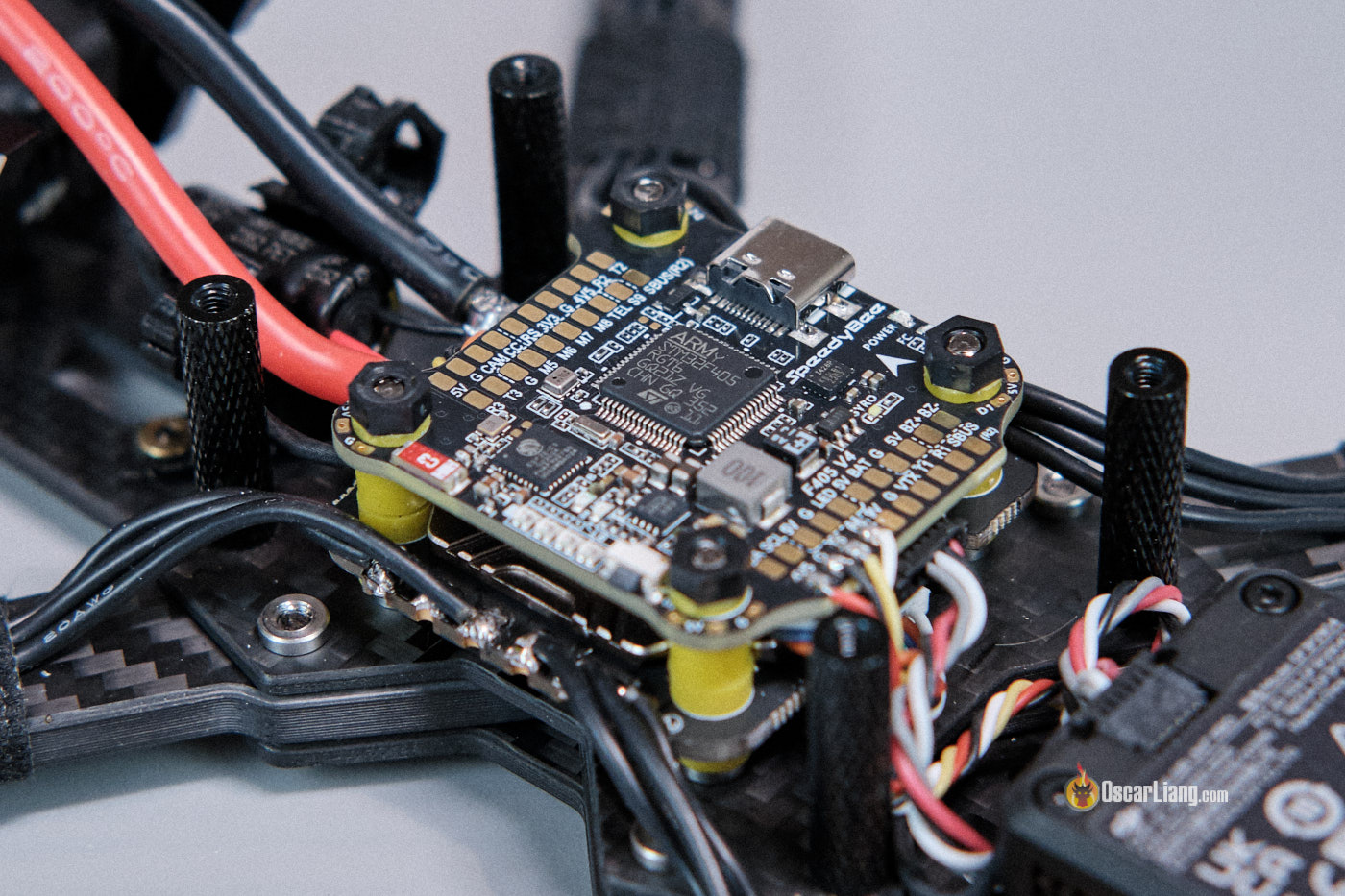
Slide the 4in1 ESC and FC boards onto the bolts.
Usually, the ESC’s energy pads (+ and -) ought to face the rear. Nevertheless, as a result of the Vapor body routes the battery lead by way of the center, it’s finest to rotate the ESC 180 levels. This implies you’ll must remap the motor order later in Betaflight (don’t fear, I’ll clarify how).

Verify fastidiously, nothing ought to contact between the underside of the ESC and the body, and between the ESC and FC boards.

Subsequent, we are going to solder the motors to the ESC. In case you’re new to soldering, seek advice from the tutorial “The right way to Solder for Learners“.
There are three widespread methods to route and solder motor wires:
- Easy and informal routing: Simply solder the wires on to the ESC pads. It’s quick and straightforward, however the construct gained’t look as clear. In case you are not good with soldering, do that.
- Neat routing round stack screws: Wires loop neatly across the screws. Appears cleaner however barely heavier attributable to longer wires (just a few further grams).
- Tight, stacking routing (my favourite): Wires are minimize as brief as potential. Very clear aesthetic, however tougher to solder because the wires are stacked on prime one other.

Safe the motor wires on the arms with material tape or electrical tape. The Vapor body package consists of plastic tubes for wire safety, they do look neat {and professional}, however I discovered them impracticable and heavy.
Measure and minimize motor wires, it’s all the time higher to depart a bit slack.

Strip about 2mm off the tip of the wires and tin the ends.

Tin all of the motor pads on the 4in1 ESC (fill the pads with a pleasant dome of solder first earlier than soldering the wires).

Don’t fear concerning the order of the motor wires—you’ll be able to simply reverse motor spin path later in Betaflight.

Now, solder the capacitor that comes with the Speedybee stack. Insert the offered heatshrink tubes, shorten and bend the legs.
Solder the capacitor onto the battery pads (+ and -) on the ESC. Take note of polarity – the unfavourable leg is marked by a light-colored stripe on the capacitor.
Why a Capacitor?
A capacitor reduces voltage spikes and electrical noise from the motors and ESC, defending your electronics in addition to decreasing noise attending to the gyro, enhancing the flight efficiency of your drone. Study extra about why capacitors are vital: https://oscarliang.com/capacitors-mini-quad/

The capacitor can now sit securely contained in the included TPU mount.

Now, solder the XT60 energy result in the ability pads on the ESC, take note of polarity (constructive and unfavourable). That is maybe probably the most difficult step on this construct, as a result of quantity of warmth required to soften the solder on the massive copper pads and thick wires. Be affected person and use a better temperature in your iron.

Soldering Suggestions:
- Use a great quantity of solder and solder flux (solder paste) for the massive pads, making certain the solder joints are shiny and full. In case you can see the wire strands, you haven’t utilized sufficient solder.
- Apply extra flux if the solder “sticks” to the tip once you take away it from the joint.
- Be at liberty to make use of a excessive temperature when soldering giant solder pads, however be fast and keep away from overheating the pads for too lengthy. Use 450°C (840°F) for motor wires and XT60, and 380°C for sign wires.
5. Testing ESC and Motors
We are going to now take a look at the ESC and motors by connecting the battery.
However earlier than plugging in a LiPo battery for the primary time, guarantee there are not any electrical shorts. Utilizing a multimeter in continuity mode, take a look at the constructive and unfavourable terminals of the XT60 (or instantly on the ESC energy pads). If there’s a brief circuit, the multimeter will beep repeatedly. On this case, don’t plug within the battery, as it could injury your elements. As a substitute, troubleshoot and repair the problem that’s inflicting the brief circuit.
For extra data on utilizing a multimeter to check your drone, try this tutorial.
Professional-Tip: A brief beep adopted by silence could happen when testing continuity attributable to capacitors charging. That is regular and shouldn’t trigger concern. So long as it stops beeping after a second or two you need to be advantageous.

Now, join the FC to the ESC utilizing the offered 8-pin cable, and join the FC to your pc by way of a USB cable.
It’s extremely really useful to make use of a smoke stopper when plugging in a battery for the primary time. Whereas not obligatory, it’s a helpful funding to keep away from damaging elements.

Don’t placed on propellers but.
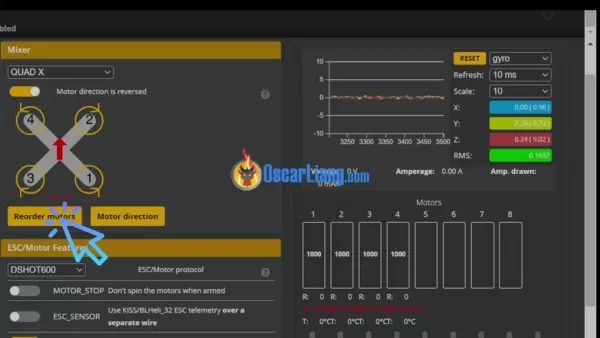
To check the motors, plug within the battery and join the USB cable to the flight controller. Open Betaflight Configurator, and go to the Motors tab.
Select DShot300 in ESC Protocol. Click on Save and Reboot.

Now, allow motor management, and it’s best to be capable of spin up the motors – do that one after the other, transfer the slider to round 1100 is sufficient.

You wan to verify the motor that’s spinning matches the quantity within the diagram, e.g. motor #1 is the rear proper, motor #2 is entrance proper and so on.
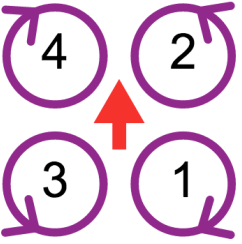
If the motor order is fallacious (almost definitely fallacious as a result of we rotated the ESC 180 levels in our construct), you’ll be able to simply repair it by clicking the “Reorder Motors” button within the motors tab, and simply comply with the easy directions. It’s also possible to repair it utilizing CLI instructions but it surely’s fairly sophisticated, so simply use the software 🙂
As soon as the motor order is right, you want to confirm if they’re spinning within the right path. To reverse a motor path, there are just a few methods, the best is to use the Betaflight Configurator (Motors tab) as defined right here.
Troubleshooting ideas:
- If motors aren’t spinning, make sure the battery is related and also you’ve turned on the Brief Saver in case you are utilizing it. And the ESC ought to beep as quickly as you plug within the battery. Be certain the ESC is related to the FC, and that the pin connections are right.
- If all motors spin aside from one, that specific ESC, motor, or the ESC sign from the FC may be defective. To troubleshoot, swap the non-functioning motor with a working one on the identical quad to find out if the problem lies with the ESC or motor.
For additional help, ask within the discussion board: https://intofpv.com
6. Receiver Setup
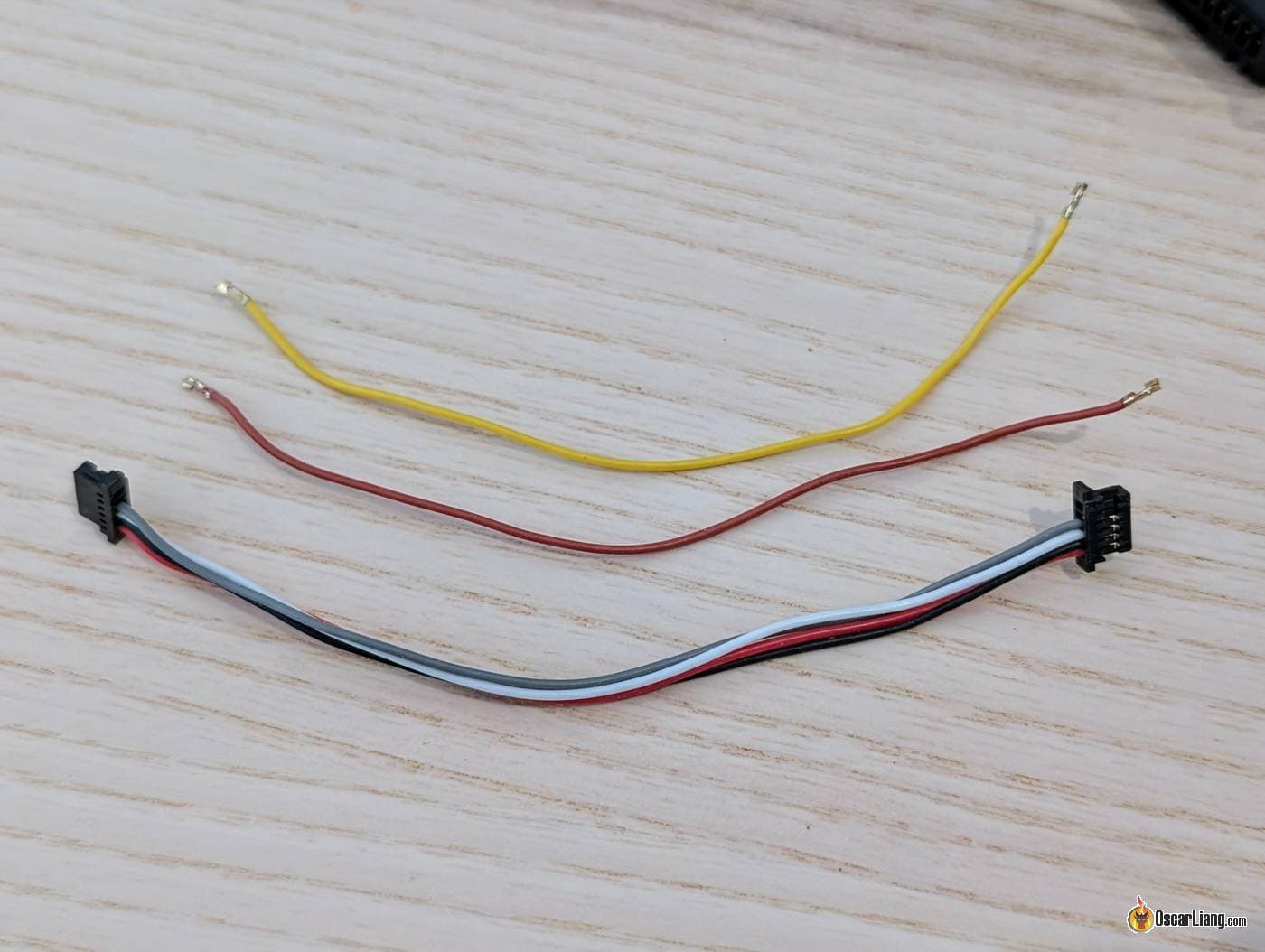
Begin by soldering the offered wires to the receiver.
Whereas the wire colours technically don’t matter, following a constant colour scheme makes troubleshooting a lot simpler. I like to recommend utilizing this colour coding:
- Black wire → GND (G)
- Crimson wire → 5V (V)
- White wire → TX (T)
- Yellow wire → RX (R)

The body features a TPU holder the place you’ll be able to neatly put the receiver in.

Wire the flight controller to the receiver like this (from FC to receiver):
- 4V5 → V (5V)
- G → G (Floor)
- T6 → R (Receiver RX)
- R6 → T (Receiver TX)

Mount the receiver and antenna securely contained in the body like this.

Now, bind your radio to the receiver by following this tutorial: https://oscarliang.com/bind-expresslrs-receivers/.
As soon as that’s accomplished, we are able to arrange the receiver in Betaflight configurator:
- Go to the Ports tab and allow “Serial RX” for the UART related to the receiver (UART6 in our instance, as a result of we related it to T6 and R6). Click on Save.
- Within the Receiver tab, choose “Serial (by way of UART)” in Receiver Mode and select “CRSF” in Serial Receiver Supplier. Allow Telemetry. Click on Save.


After this, the receiver needs to be working. To verify, go to the Receiver tab, and the bars (channel values) ought to change once you transfer the sticks on the radio. If the fallacious channels are responding, attempt a distinct Channel Map similar to “default (AETR)” or “TAER”.
You will have to setup switches on the radio for arming, flight modes and beeper. Observe this tutorial to find out how: https://oscarliang.com/setup-switch-mixes/

In case you have any questions, publish within the discussion board: https://intoFPV.com
7. Putting in DJI O4 Professional
Connecting the DJI O4 Professional Air Unit to the Speedybee flight controller couldn’t be easier—simply plug within the offered cable and also you’re good to go. The O4 Air Unit will likely be mounted on prime of the receiver.

Push the 2 O4 Professional antennas securely into the holes within the rear TPU antenna mount.

In case you’re controlling the drone utilizing ExpressLRS, it’s possible you’ll wish to take away the SBUS and GND wires from the O4 connection cable. These wires are supposed for the DJI distant controller, and leaving them related could cause conflicts should you’re utilizing the identical UART for an additional system.
Mount the digital camera between the silicone dampers included with the body.
In case you’re new to flying, you would possibly wish to begin with a decrease digital camera tilt angle like 10° to fifteen°. As you turn out to be extra snug and begin flying quicker, you’ll be able to improve the lean to twenty° and even 30° for higher ahead visibility at pace.

Now we’ll configure OSD (On-Display Show) to point out vital flight knowledge like battery voltage, flight time, and warnings instantly in your DJI goggles.

I’ve a full step-by-step information right here if you’d like extra element: https://oscarliang.com/how-to-setup-dji-o4-pro/
To summarize the method:
- In Betaflight Configurator, go to the Presets tab.
- Seek for “OSD for DJI”.
- Choose the preset you discover.
- Within the choices, choose “map to displayport”, “set HDOSD”, and the UART you’ve related the O4 to (in our instance that’s UART1).
- That’s it.


Now, head to the OSD tab, allow your favorite components and transfer them round as you would like. Be sure to’ve chosen HD below Video Format so you might be utilizing all of the display screen house obtainable. I’ve my very own OSD layouts if you wish to copy: https://oscarliang.com/betaflight-osd/#My-OSD-Setup-CLI-Instructions

8. Ending Off
Safe the flight controller (FC) with nylon nuts.
Tighten solely by hand to keep away from over-compressing the rubber grommet because it might cut back vibration damping and defeat the aim of soppy mounting.

Subsequent, set up the highest plate.

Listed below are the weights of the finished drone:
- Drone together with propellers and battery strap: 453g
- Drone + 6S 1100mAh LiPo: 645g
- Drone + 6S 1100mAh LiPo + GoPro 13: 802g

When putting in the propellers, take note of the completely different rotations—CW (clockwise) and CCW (counter-clockwise). Guarantee they’re put in on the proper motors; in any other case, your quad could not take off or might flip over when attempting to.

Use M5 nylon lock nuts to carry the propellers securely on the motor. Tightening may be difficult at first however will turn out to be simpler over time. Keep away from overtightening to stop prop hub shattering. Tighten simply sufficient so the prop can’t transfer once you attempt to rotate it along with your hand whereas holding the motor bell.
A devoted prop nut software can pace up prop modifications.

When mounting the battery (and GoPro), make sure the COG (heart of gravity) is as near the drone’s heart as potential. To test if the battery is positioned appropriately, seize the center of the highest plate with two fingers and see if the quad stays degree. It’s important to keep up the COG on the heart of the 4 motors. As an example, if the quad is front-heavy, the entrance motors will work tougher than the rear motors when attempting to keep up its place, negatively impacting flight efficiency.

And we’re prepared for a take a look at flight!






9. Setting Up Betaflight
We’ve already lined a lot of the Betaflight setup throughout this construct. Nevertheless, to double-check every thing and guarantee nothing is missed, comply with my full newbie’s tutorial right here: https://oscarliang.com/betaflight-firmware-setup/
10. Tuning
Tuning your quadcopter entails adjusting it to fly and behave the best way you need. Betaflight has come a great distance; you don’t must tune your quad, and it’ll seemingly fly simply advantageous with inventory settings. Nevertheless, should you’re critical about efficiency, there’s extra to be taught!
For most individuals, tuning an FPV drone entails adjusting these settings:
Tuning is sort of technical and typically entails using Blackbox logs. In case you don’t know use Blackbox, that is tune your FPV drone in 10 easy steps. In case you’re accustomed to Blackbox, try this in-depth information on tuning filters and PID.
Earlier than tuning, although, I’d advocate flashing Bluejay firmware to the ESC if they arrive with BLHeli_S firmware, it offers you higher efficiency. When doing so, you’ll want to decide on between the 24kHz or 48kHz variations. The 24kHz model offers higher responsiveness and torque, whereas the 48kHz model affords smoother flight with barely much less torque. I like to recommend 48KHz. It’s also possible to allow bi-directional Dshot, and activate RPM filter when you’ve flashed Bluejay. It’s among the best filters obtainable in Betaflight and makes your quad flies higher.
I’ll share my PID and Filter tune for this construct in my Patreon shortly, if you wish to attempt my tune, contemplate subscribing: https://oscarliang.com/patreon-support-announcement/
11. Studying The right way to Fly
In case you have little to no expertise flying a mini quad, contemplate testing these tutorials to get began:
In case you have any questions, be at liberty to ask within the feedback.
You possibly can test my previous construct guides (some data is outdated):